|
|
Home Application Features | Pictures Login Buy Now |
The main terms and definitions
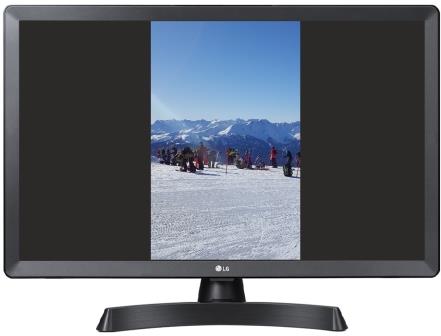
How to understand the terms in the specifications of telepresence robotsWhat is a Telepresence RobotA telepresence robot is an automated system that contains audio and video communication tools, as well as motors for remote control of the movement of the robot and its individual parts. The essence of the telepresence is very clearly described in James Cameron's film "Avatar". It is a complete remote presence, with all the sensations and emotions associated with it, with the transmission of signals from and to all the sense organs. The robot, which provides only tele-controlled video and audio communication, physically transmits only sound and video, but psychologically achieved a much stronger effect: the robot allows you to see facial expressions, gestures, eye expression, changes in the situation, the movement of people in the room and feel the movement of himself. It's much more than just a video conference. This creates a feeling of your presence in the team. Psychologically it is quite another level of communication than phone or video conference. So, the telepresence robot can be seen as an extremely simplified case of the avatar. Telepresence Robot stability. Weight and base dimensions. Segway type.Any consumer wants to have a light robot, but the higher the robot and the lighter its base, the easier to tip it to the floor. For example, while driving, the robot can catch the body on the edge of the table and topple over. Remember: all floor lamps in the house have a heavy and wide base. The same goes for the robot. Its base should be heavy and wide to increase stability. The weight of the tablet in the robot head has a big influence on the robot's stability. A tablet with a bigger size (12 inches, for example) will give more head shaking in comparison with a tablet of 10 or 8 inches. Stability in the direction of movement of the robot can also be provided by an automatic control system, as is done in segways. However, the disadvantage of this design is the fact that the feedback in the automatic balance system is broken as soon as the wheel hits an obstacle (for example, clings to a wall or the edge of a table) and the segway falls to the ground. Second disadvantage is autobalancing system consume energy even if they do not move. Autodocking and Manual docking featuresAttention! If you use iPad in the robot head, you must to press "Orientation" button on the "Settings" page in this tablet. The telepresence robot can be docked manually or automatically. Manual docking means that the remote operator drives the robot to the docking station just like he/she drives it around the room. Tanks to very precise control, BotEyes docking is made very easy, see video below and take attention that you can drive robot from any direction, at any angle to the dock station: Autodocking works as follows: the operator brings the robot close enough to the docking station (for about 1 meter in front of the robot) and presses the "Docking" button. Next, the robot analyzes the shape of the dock itself with its camera and image analysis software or using infrared sensors and LEDs, and himself drives into the dock. If you use iPad, you need to give the permission for browser access to position sensor. To do that, press the "Orientation" button. Because the robot needs to see where to go, you need to provide very good light around the docking station and absence of glares around that place. If robot cannot hit in the dock station, you can adjust the scope by sliding the tablet to the left or right in its handler phisically. Instead of adjusting the robot by sliding the tablet, you can use programmatically adjustment using "Gear" button ("Settings") and the item "Adjust robot body center for autodocking" in the tablet in the robot head. Not all the robots must have this feature. The fact is that most of the commercial available robots in the market today do not allow a user to change moving speed during movement and to turn robot for a small angle. It makes very difficult to dock robot and therefore robots of this type need to have autodocking feature. Unlike this, if robot allows user to change speed and moving direction accurately, like BotEyes does, then autodocking becomes unnecessary and user can dock robot using web interface very easily, see video below: Crash AvoidanceAs a rule, robots with precise control and a good overview of the environment easily avoid collisions with obstacles such as chairs, tables, walls or people. However, to increase the degree of safety, some robots are equipped with automatic systems that stop the robot if the distance for obstacle becomes too small and inform the operator. This feature is called "collision avoidance". This is done using ultrasonic distance sensors or laser rangefinders. In the video below you can see how BotEyes robot avoids some obstacles. Pay attention to blinking warning in the top middle position on the page. Bandwidth required and Video ResolutionThe required bandwidth (bitrate) of the internet channel depends primarily on the resolution of the video image, the method of video compression, the frame rate (at 10 frames per second, the discontinuity of the video is no longer noticeable to the eye). The required bandwidth can be defined very roughly like this (see this link for details ): [required bitrate] = [image width] x [image height] x [frame rate] x [motion rank] x 0.07 where the motion rank depends on how fast the scene changes. For example, if the camera shoots a landscape where almost nothing changes, then motion rank = 1; if the camera shoots a ring with boxers, then motion rank = 4. If the telepresence robot is standing still and there is no one in the frame, then motion rank = 1. If the robot is driving, then motion rank = 2, if the robot turns around or lowers its head, then the scene changes as quickly as possible and motion rank = 4. For example, if you use a camera with a resolution of 1280x720 and the frame rate is 24 frames per second, the robot stands still and shoots a quiet scene, we get 1280 x 720 x 24 x 1 x 0,07 = 1.5 Mbps If the robot rides on the flat floor of a long corridor, when only the view of the walls changes (motion rank = 2), we get 3 Mbit/s. If the robot is deployed when the scene changes very quickly and significantly, motion rank = 4 and the required bandwidth is 6 Mbit/s. This estimation is very approximate, because it does not take into account the color depth (8 bits or 24 bits), the way the color is encoded, the number of difference frames (B-frames) in the video stream, and the compression method (usually h.254 or VP8, VP9). The telepresence robot should receive video in real time, i.e. it is impossible to use a buffer to smooth out jumps in the video transmission rate and dips in the communication channel bandwidth. More precisely, the buffer should introduce a delay of no more than 0.1...0.2 s. With a larger delay, the mismatch between the moment of touching the control circle and the beginning of the robot's movement makes the control process uncomfortable. Therefore, if information arrives faster than the channel can skip, the video communication system should automatically reduce the video stream rate so that the video is not interrupted. Video communication in almost all telepresence robots is based on WebRTC (Web Real-Time Communications) technology, developed and standardized by Google and implemented in a number of web browsers. WebRTC solves the problem described above by automatically reducing the frame size. Therefore, if you set the resolution of the camera, for example, 1280 x 720 pixels, and your Internet channel has a bandwidth of 5 Mbps, then if the robot turns around or goes on an rough surface (when the robot's camera shakes), [motion rank] increases sharply, the required bandwidth increases and the WebRTC algorithm automatically lowers the frame size. The clarity of the video is noticeably reduced. After the robot stops, the clarity is automatically restored to match the actual bandwidth. The bandwidth of the Internet channel is not the only limitation of the video size. It is very important to have processors of sufficient performance on the transmitting and receiving sides. A computer with a RAM capacity of 3 GB and a 4-core processor will hardly provide processing of a video stream of 6 Mbit/s. Therefore, even though the tablet may have a camera of, for example, 5 Mp, you will not be able to transmit video at this resolution due to processor performance limitations. As for example, our robot for test drive uses Huawei Mediapad T5 tablet, it's price is about $250. Manufacturers of telepresence robots usually specify the required Internet speed in their specifications. This characteristic, in our opinion, does not contain useful information and only misleads the consumer. In fact, the size (resolution) of the video depends on the performance of the gadgets on the receiving side and in the robot and on the bandwidth of the Internet channel and does not depend on the features of the software implementation of the robot, if it uses WebRTC technology and if there are no errors in it. The required bandwidth or video resolution also does not depend on the type and performance of the servers used because WebRTC always uses P2P (peer-to-peer) channel, in which the server is only needed to receive IP addresses and does not participate in video transmission. In very rare cases (less than 6% cases) WebRTC uses a TURN server and then the video resolution depends on its performance. It should also be kept in mind that the mobile Internet, as a rule, has a very poor quality and does not allow you to transmit video in high resolution. Aspect Ratio for VideoMonitors and video camera matrix are never square. Standard aspect ratios are 4:3, 3:2, 16:9, 17:9, etc. Therefore, in order for the image from the camera to fit completely on the monitor screen, the aspect ratios must be consistent. Look at the pictures below. First case: tablet in robot is positioned vertically
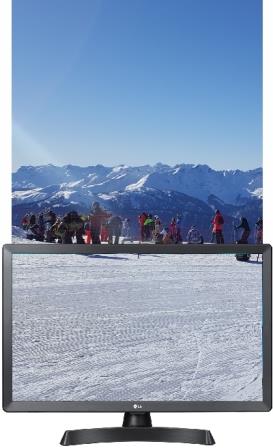
Second case: tablet in robot is positioned horizontally
Battery typeMany telepresence robots use lithium-ion and lithium-polymer batteries, like those used in segways. They have a large capacity per unit weight. However, such batteries and robots containing such batteries are dangerous goods and are prohibited for transportation by aircraft for this reason. There are cases where they simply ignite, see for example, the table on the website of the US Department of Transportation. You can see some episode with segway ignite on Youtube. Here is some of the cases:
In contrast to this, the BotEyes robot uses safe lead-acid non-spillable batteries, which are safe products. The second advantage of lead-acid batteries is their big weight, which provides the robot with good stability. Robot HeightTo ensure the comfort of communication with the telepresence robot, it must have the height of an average person. However, from purely geometric reasons, it follows that if one of the wheels hits a bump on the floor and rises, the "head " of the robot will deviate much more. For example, if the distance between wheels is 20 centimeters and the height of the robot is 140 centimeters (140/20 = 7), under irregularities on the floor of 2 mm deviations from the vertical position will be equal 2 * 7 = 1.4 centimeters, that is very big. To resolve this problem is extremely difficult and therefore all without exception telepresence robots "shake their heads" while driving, but to varying degrees. The wider the base and lower the robot, the less amplitude of rocking. Auto-AnswerThe vast majority of video communication tools do not have a mode when you can call and at the other end of the wire will automatically "pick up". This is done to ensure privacy. However, for telepresence robots, this mode is often necessary. For example, you left the robot at home, and went to rest and want to see if the iron is turned off, whether the water flows from the tap. There is no one at home and there is no one to answer, i.e. the telepresence robot must be able to "pick up the phone" itself, i.e. automatically answer an incoming call. Similarly, if you are a remote worker and want to communicate with someone in the office, the robot should be able to automatically start a video broadcast so that you understand where to go. Run timeThe duration of operation without recharging is a very uncertain parameter that can mislead the buyer. The fact is that the main part of the energy the telepresence robot consumes while driving, i.e. it would be correct to divide this parameter into two: for the time of continuous driving and the time of work at rest. However, in real operating conditions, the robot does not travel much, most of the time is used for video communication. Therefore, unless otherwise specified, the parameter "Run time" would be logical to understand the duration of video communication without recharging. Tablet AutochargingIf the telepresence robot comes without a tablet, there may or may not be an option of autocharging for the tablet. Automatic charging means you don't need to connect the robot to the charger every time if the power level is too low. It is enough to connect the tablet charging cord to the robot only once when you mount the tablet on the robot. Next, the tablet is charged from the robot's battery, and the robot is charged from the dock. Second Camera for NavigationSome telepresence robots on the market today use two cameras. One of it looks at the interlocutor, second - to the floor for robot navigation and obstacle avoidance. You may like it, may not. But this approach has the next disadvantages:
It is why the BotEyes robot doesn't use the second camera to see the floor. The second camera has only one advantage: users do not need to tilt the main camera to see the floor. Tilt-abled HeadTelepresence robots come with fixed cameras and screens and with tilt-abled ones. The tilting head of the robot gives a greater advantage: when communicating with a person, this function allows you to point the camera directly at the face, so that both people who have entered into communication can see each other well. If the robot is used to inspect the room, the rotary camera allows you to see well and what lies on the floor and what hangs on the ceiling. Moreover, the tilting head allows you to very accurately go around obstacles, because to see them very sharply it is enough to slightly tilt the camera down. Telepresence robots that do not have the function of tilting the head are forced to use two cameras: one to "look down" and the second to look forward. The second camera is usually used with lenses that, however, distort the surrounding space, reduce the number of pixels of the image per unit length of the scene, or require increased bandwidth of the Internet channel (see Bandwidth required and Video Resolution above). Moreover, camera pointed at the wheels takes a useful place on the screen when the robot is not moving. How does it work, see here: Fish-Eyse lensIf the robot has not tilt-abled head or if the tilting span is very small, the telepresence robot can use "fish-eye lens" that enlarges the visible space (see picture below). It is good, but it distorts the visible scene very high. The BotEyes robot can tilt its head very much, so the user doesn't need to use the fish-eye lens, but can use it.
Android/iOS/Windows/MacOS compatibilityOnly some robots allow you to use any gadget with any operating system (Android, iOS, Windows, MacOS) in the head of the robot or for robot control. This circumstance is very important if you have your favorite OS, your favorite browser or your favorite gadget. Providing such versatility requires additional efforts from the robot manufacturer. Speaker PowerIf the robot uses an ordinary tablet, the power of its speakers usually does not exceed 1 watt. This is enough to communicate in a quiet room, but in a large noisy room this power is not enough and therefore some telepresence robots use external speakers to increase the volume of sound. If these speakers are missed in the robot, the user can always buy inexpensive external speakers and connect them to the tablet in the robot head robot via BlueTooth or wire through the 3.5 mm Jack connector. Is it possible to watch the image from the robot on the TV?Yes, you can. Many modern TVs have Skype preinstalled. Therefore, if you use a robot that can work with Skype (such a possibility is available, for example, in BotEyes robot), then you call on Skype from the TV to the robot, and control the robot from your gadget or computer. The second option is to output the image from your gadget to the TV screen, which can be done with a WiFi or HDMI cable. Robot speed controlOnly a small number of robots on the market allow you to adjust the speed and even rarer robots allow you to smoothly change the direction or speed of movement without stopping. In the BotEyes robot, this possibility is realized thanks to a two-dimensional control circle, the position of the cursor or finger on which immediately sets the direction and speed, which can change during movement. Speed changing is very important if you need to go safely in a very tight environment, for example, in school or hospital between two tables or chairs. |
||||||||||||||||||||||||||||||||||||